
MONTH 2023

Robotics
This three-finger mechatronic gripper can handle heavy payloads. Photo courtesy Schunk Inc.
End-of-arm-tooling is smarter and more flexible than ever.
End-Effectors
What’s
New
With
Austin Weber // Senior Editor // webera@bnpmedia.com
Robots come in a variety of shapes, sizes and speeds. But, whether it’s a cartesian, cobot, delta, SCARA or six-axis machine, they all share one thing in common: end-of-arm-tooling (EOAT).
Grippers, suction cups and tool changers attach to a robot’s flange, or wrist, to enable it to perform specific tasks. Mechanical and soft devices are used for many types of assembly and material handling applications.
End-effectors have evolved from simple jaws to high-tech components capable of advanced force compliance and complex manipulation. Electric, magnetic, pneumatic and vacuum activation are available in many different configurations.
One of the latest trends in robot end-effectors is a move toward energy-efficient, all-electric devices, especially for mobile platforms that can’t rely on compressed air.
“This shift supports greater sustainability and flexible deployment,” says Joey Guilfoyle, senior applications engineer for vacuum automation at Schmalz Inc. “Where pneumatic systems remain necessary, OEMs and robotic system integrators are prioritizing technology such as multi-stage vacuum generators and integrated air-saving functions into their designs.
“This technology helps reduce energy consumption, while maintaining high performance in areas like logistics and packaging,” explains Guilfoyle.
According to Guilfoyle, manufacturing engineers are increasingly focused on ease of integration and transparency. “They expect easy access to CAD models, clear technical specifications, and accurate pricing and lead times,” he points out.
“One of the trends that we see is having off-the-shelf fingertips available without needing to customize them for each project,” adds François Thibodeau, technical manager at Robotiq, a Canadian company that specializes in collaborative robot technology. “This speeds up the integration process by avoiding design and manufacturing phases.”
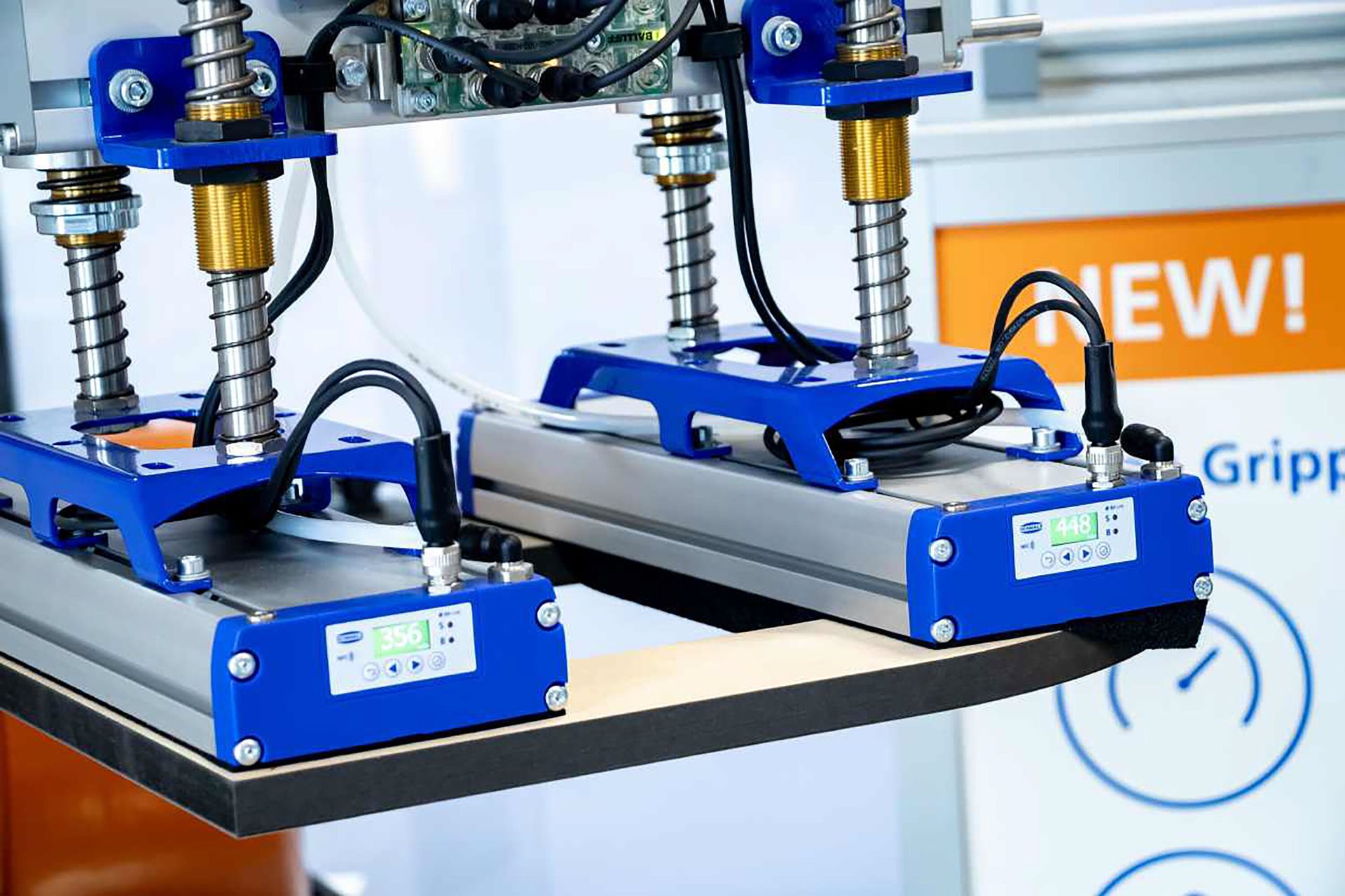
Built-in sensors provide real-time data for predictive maintenance and energy monitoring. Photo courtesy Schmalz Inc
Out-of-the-Box Tools
Thibodeau says many engineers are looking for “out-of-the-box solutions” to their automation challenges. “For example, our machine tending product allows our software to communicate with [production equipment] in a noninvasive way,” explains Thibodeau. “We do not need to go inside the control box and rewire.
“We use sensors that tell the robot which phase the machine is at and use accessories like push-button activators to start the machine,” notes Thibodeau. “This would be the same as having an employee looking for the signals of the machine to get to the next step or the next part.”
“[Today, manufacturers want] to get as much out of the EOAT tooling as possible, such as feedback, modularity and flexibility of products they can grasp,” adds Anthony Leo, president of IPR Robotics LLC. “[We’re also seeing] softer designs to handle delicate or irregularly shaped objects. Recent developments in finger materials, such as elastomers and silicones, have enabled new options to make consistent grasping possible in traditionally hard-to-automate applications.”
In addition, Leo says the combination of EOAT with tool changers is allowing more flexibility by enabling robots to easily change tasks—either manually or automatically—while also improving the speed of maintenance tasks.
“Sometimes, reducing the size or complexity of one large tool down to a few smaller [devices] with tool changers can allow for easier design, maintenance and flexibility,” explains Leo. “Potentially, this could also reduce the size of robot required, which could make plant floor footprints smaller.
“Modularity has become much more important today, as budgets are being closely scrutinized,” says Leo. “It can allow for more flexibility in adding smart sensors for force, torque and tactile [applications]. This [affects] the design of the tool, in addition to giving it the ability to be more dynamic and allow real-time adjustments for more precise operation.”
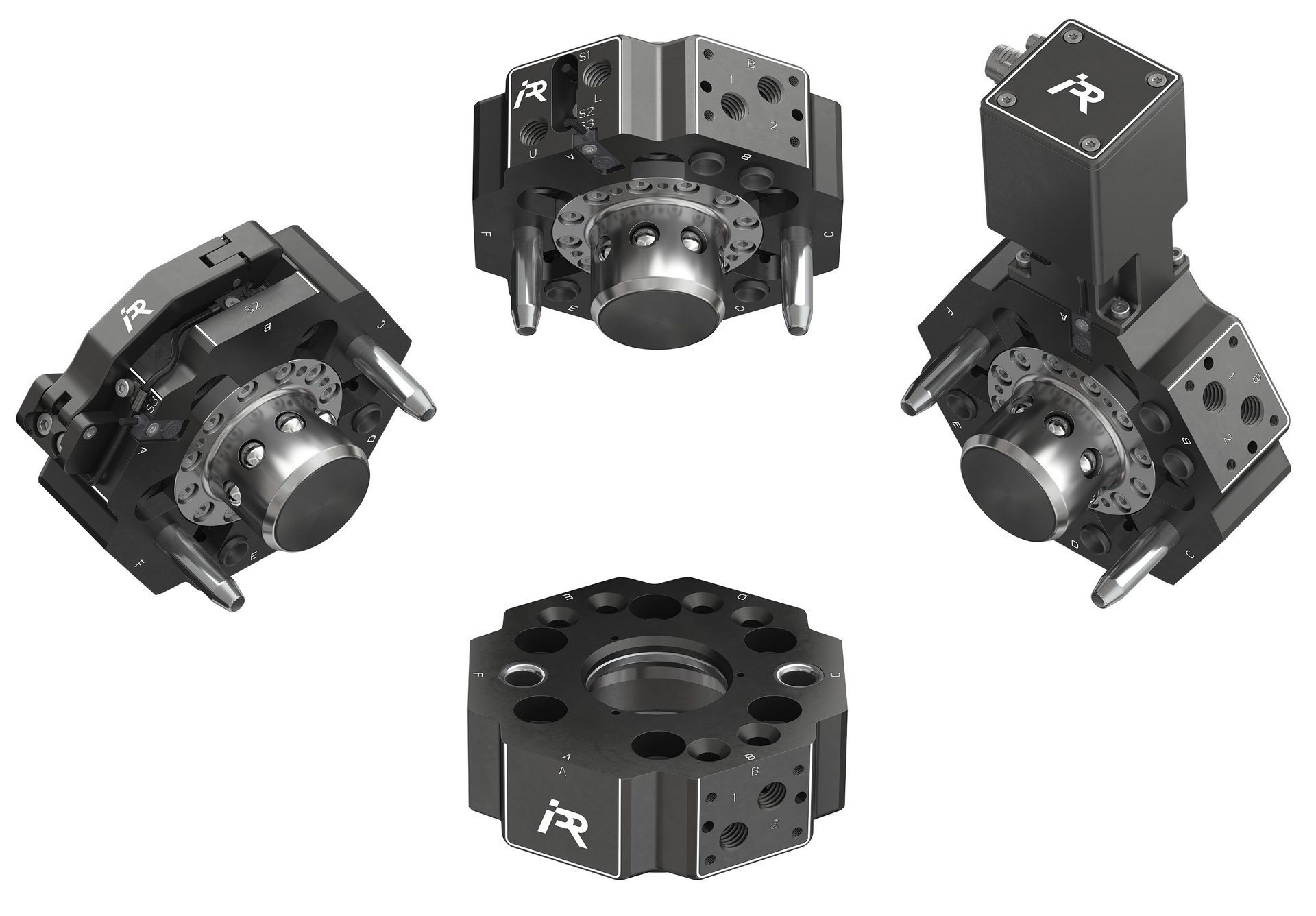
Tool changers provide manufacturers with flexible automation. Photo courtesy IPR Robotics LLC
AI and Flexibility
Artificial intelligence and machine learning technology are also affecting robotic end-effectors. For instance, it can be used to streamline the deployment of automation equipment.
“In the last few years, end-effector manufacturers have released advanced gripping technology hardware that enables flexible and quick deployment for varying workpieces,” says Aaron Royster, group manager of project engineering for gripping and automation technology at Schunk Inc.
“Many of these technologies already work in native environments on both collaborative and industrial robots,” explains Royster. “However, this still requires human intervention to set up, fine-tune, deploy and then redeploy automation when changing production jobs.”
According to Royster, recent advancements in AI bring opportunities for shortening the time and effort required to set up automation, which continues to be a barrier for wider robot adoption.
“For experienced users of automation equipment, deploying a robot cell with a gripper to load and unload workpieces from a [machine] is easy,” claims Royster. “But, what about the small job shop that has never automated before?
“Often, the learning curve is perceived as too high and small companies choose not to automate,” notes Royster. “This limits their ability to scale and grow as labor shortages increase.”
Pneumatically actuated end-effectors are traditionally the most popular EOAT option, due to their high performance in a small form factor. Even with the push toward flexible, motor-driven technologies, Royster says pneumatic devices continue to offer numerous benefits.
That’s why Schunk engineers recently developed the PGL+P pneumatic gripper. It features benefits like longer stroke, integrated sensing via IO-Link and a certified safety system.

This vacuum gripper is designed for palletizing applications. Photo courtesy Robotiq
Smarter Grasping
Schunk also uses AI to streamline and simplify deployment with a SmartGrasping application kit that includes a robotic end effector, an industrial PC, a camera and proprietary software. Using these technologies allows someone who may have never integrated automation equipment before to successfully deploy a collaborative robot in just a few hours.
“SmartGrasping uses AI to identify the position of workpieces, decide the best way to grip the part and finally execute the move,” says Royster. “This can all be set up easily via a web-based HMI with about 20 pictures, a few minutes of mapping and then running a learn cycle.
“After that, you have a fully functional robotic end effector system to pick and place workpieces, assemble components or one of the many other applications that SmartGrasping can enable,” claims Royster.
Manufacturing engineers are looking for new types of end-effectors today, and continue to demand flexibility in automated equipment.
A flexible robotic end effector typically refers to a gripper that has a lot of travel or stroke. This means that the gripper can handle a wide variety of applications if the workpiece being handled has dimensions that can change from day to day or job to job.
“A complementary trend that manufacturing engineers look for today is embedded systems for monitoring, control and regulation of functions,” says Royster. “External sensors and systems can often be reduced, because they are integrated into the robotic end-effector itself. It also elevates the importance of intuitive software and controls to access, analyze and act on data captured in automated controls.
“If you need to change [tooling] to set up a robot to do a new job, you may need to change the gripper instead of using a flexible gripper,” Royster points out.” Robotic end-effectors are offered in a variety of force-generating mechanisms to serve a variety of applications.
“Tool changers enable end-effectors to be automatically exchanged, even if you are changing from one technology, such as pneumatic, to another, such as magnetic,” explains Royster. “Automated robotic tool changing increases flexibility and throughput of automated cells.
“We see this as such an important part of the end-effector ecosystem that we recently launched a new portfolio called Robot PLUS,” claims Royster. “It [equips] robots to do more. Often, end-effectors must be paired with supporting technologies like compensation units, automated or manual tool changers, and custom gripper fingers.”
New Products
Manufacturing engineers have a variety of end-effector options available today. Here are some of the latest, state-of-the-art devices.
Although area gripper technology has been around for some time, Schmalz’s FA-X and FA-M series are focused on high performance, minimal energy consumption and easy integration. The tools will be available this fall.
“The FA-X features individually controlled ejector nozzles and a patented energy-saving function, making it ideal for handling porous materials like cardboard,” explains Guilfoyle. “Its compact design simplifies mechanical installation, and built-in sensors provide real-time data for predictive maintenance and energy monitoring via LED display, IO-Link or NFC connectivity.”
Robotiq recently unveiled PowerPick Multi, a vacuum gripper designed for flexible palletizing applications. It enables popular cobots, such as the UR10, to pick up boxes or cases that weigh up to 25 pounds.
“PowerPick Multi offers flexibility to help [manufacturers] manage a wide range of box sizes, shapes, weights and packaging materials,” says Thibodeau. “It eliminates constant gripper changeovers, manual handling and the inevitable risk of errors, allowing a smarter, more efficient way to palletize. The system is also reliable when exposed to less controlled conditions such as humidity and fine dust.”
IPR’s newest product is the TKX Series Tool Changer. “It allows the flexibility to use one tool side for all of our robot side options—electric, manual and pneumatic,” claims Leo. “This can save [money], since you don’t need to order both sides in the future if you want to change from manual to pneumatic, for example. It also can be fully customized with various sensors and other accessories, giving it the ability to be tailored to exactly what customers need.”
Schunk recently launched the EZU, a three-fingered mechatronic gripper designed to handle heavy payloads. It features rigid jaw guidance and long stroke paired with advanced sensing and control functions.
“We know that manufacturers often have an existing controls network that they need to work in [when adding] new devices,” says Royster. “EZU is offered in EthernetIP, EtherCAT, IO-Link, ModBus, and Profinet for quick, easy configuration on most networks.
“Features like position sensing across the full stroke of the gripper, and an option for integrated brake, [enable] process efficiency and control that is highly sought after today by manufacturing engineers who demand advanced process data,” explains Royster. “The EZU is also available as a two-finger gripper called the EGU.”

ASSEMBLY ONLINE
For more information on robotic end-effectors, visit www.assemblymag.com to read these articles:



